Empresas Premium





En su apuesta por el desarrollo y digitalización de la industria, Festo presenta sus nuevos proyectos biónicos: BionicSoftHand, BionicSoftArm y BionicFinWave. Como previa a la Hannover Messe, se ha celebrado el Tech Talk para analizar el potencial y las oportunidades que la IA ofrece en el desarrollo de la automatización, así como el papel de Festo en este contexto
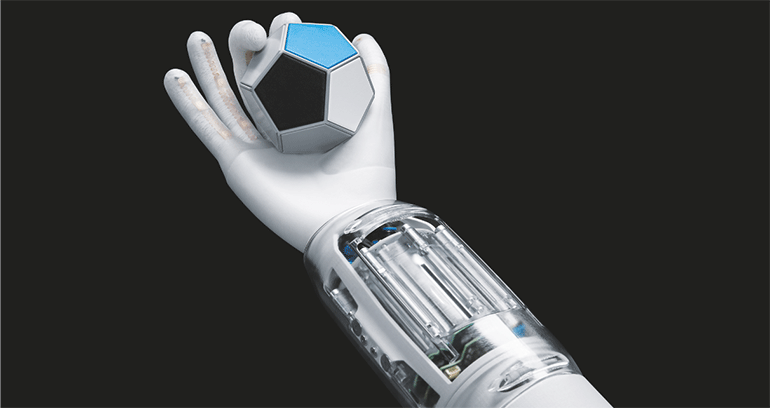
BionicSoftHand es uno de los nuevos biónicos neumáticos presentados por Festo este año, que interactúa de forma segura y directa con las personas. Sus dedos están formados por estructuras flexibles de fuelle con cámaras de aire y materiales blandos, que lo dotan de ligereza, flexibilidad, adaptabilidad y sensibilidad, así como de capacidad para ejercer fuerza. BionicSoftHand rota un cubo de 12 lados para que uno de ellos, previamente seleccionado, apunte hacia arriba. La estrategia de movimiento se enseña en un entorno virtual con la ayuda de un gemelo digital, creado a través de los datos extraídos por una cámara de profundidad-detección, la visión de un ordenador y los algoritmos de la IA.
Posterior al BionicMotionRobot, en este encuentro también se ha presentado BionicSoftArm, que amplía significativamente la gama de aplicaciones de su predecesor. Gracias a su diseño modular, se pueden combinar hasta siete segmentos de fuelle neumático y accionamientos rotativos, hecho que garantiza la máxima flexibilidad, en términos de alcance y movilidad, para trabajar en espacios estrechos, con múltiples obstáculos o de difícil acceso.
Durante Tech Talk, también se ha presentado BionicFinWave, inspirado en las planarias marinas y las sepias. Este biónico submarino autónomo reproduce el movimiento de sus homólogos biológicos mediante dos aletas laterales recubiertas de silicona, que trabajan sin la presencia de travesaños u otros elementos de protección. Las dos aletas (a la izquierda y a la derecha) cuentan con nueve brazos de palanca de tamaño reducido. De este modo, los brazos reciben el impulso necesario desde dos servomotores alojados en el cuerpo del robot submarino, y los dos cigüeñales adyacentes transfieren la fuerza a las palancas, con el objetivo de que ambas aletas se puedan mover de manera individual.